Rodzaje stosowanych map elektronicznych: mapy numeryczne, rastrowe, hybrydowe.
Rodzaje stosowanych map elektronicznych: mapy numeryczne, rastrowe, hybrydowe.
Mapy numeryczne (wektorowe)
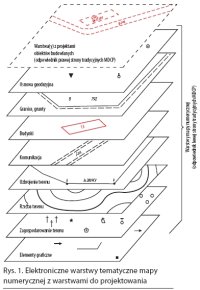
Mapy numeryczne w takich programach inżynierskich jak np. AutoCAD, MicroStation, ArcInfo czy C-GEO to elektroniczne warstwy tematyczne z obiektami i elementami graficznymi (rys. 1). Warstwy te po nałożeniu na siebie dadzą pełny obraz mapy numerycznej, który będzie odpowiednikiem lewej strony map foliowych. Projekty obiektów budowlanych można sytuować na założonych przez projektantów „czystych” warstwach elektronicznych, co z kolei będzie odpowiednikiem prawej strony map tradycyjnych. Warunkiem koniecznym do stworzenia mapy numerycznej jest posiadanie współrzędnych płaskich (a dla części dotyczącej rzeźby terenu – współrzędnych przestrzennych) wszystkich tzw. obiektów ogólnogeograficznych, elementów ewidencji gruntów i budynków, sieci uzbrojenia terenu: nadziemnych, naziemnych i podziemnych oraz dodatkowej treści uwzględniającej specyfikę poszczególnych branż projektowych.
To, że mapy numeryczne nazywa się też wektorowymi, oznacza, że wszystkie obiekty budowlane i szczegóły terenowe zostały przedstawione na tej mapie, na poszczególnych warstwach w postaci wektorów przedstawiających obiekty: zamknięte, czyli powierzchniowe (np. budynki, działki); liniowe (np. odcinki uzbrojenia podziemnego) i punktowe, jak drzewa, latarnie itp. W tym ostatnim przypadku wektory są zerowe i stanowią punkty otoczone stosownymi symbolami. Mapy numeryczne zajmują dużo mniej miejsca na nośnikach informacji niż mapy rastrowe, są więc bardziej „mobilne”. Mapy numeryczne są realizowane w technice wielobarwnej. Jest to duże udogodnienie dla projektantów, uniemożliwiające zaprojektowanie np. przyłącza gazu do wodociągu przedstawionego w kolorze niebieskim. Zespoły uzgodnień dokumentacji projektowych mogłyby podać wiele przypadków błędnej interpretacji uzbrojenia podziemnego na czarno-białych, foliowych mapach do celów projektowych. Rzeszów należy do tych nielicznych miast, które mogą szczycić się posiadaniem mapy numerycznej (w systemie MicroStation), na rys. 2 przedstawiony jest fragment Miasteczka Akademic
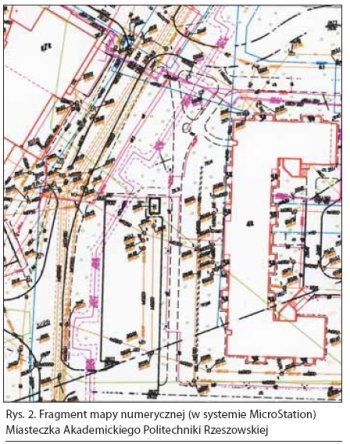
kiego Politechniki Rzeszowskiej.
Pomijając zagadnienie kosztów licencji programu projektowania inżynierskiego podstawową barierą stosowania map numerycznych do celów projektowych jest niewielkie, jak na razie, pokrycie nimi terenów w Polsce. Zakładanie map numerycznych należy do zadań starostów i prezydentów miast i niewielu z nich może takimi się pochwalić. Trudno zrozumieć, dlaczego Główny Urząd Geodezji i Kartografii nie ma wiedzy o stopniu pokrycia Polski numeryczną mapą zasadniczą. Taka wiedza powinna być gromadzona co roku, a to dawałoby obraz w zakresie postępu w zakładaniu map numerycznych i byłoby skutecznym środkiem nacisku na powiaty ziemskie i grodzkie lekceważące te zadania.
Mapy rastrowe (pikselowe) i zagadnienie kalibracji tych map
Mapy rastrowe to przekształcone za pomocą skanerów dane z map analogowych (foliowych lub papierowych) do postaci elektronicznej. W procesie skanowania obraz zostaje „rozbity” w regularną sieć kwadratów nazywanych pikselami, które jednocześnie tworzą układ współrzędnych pikselowych. Istotną sprawą dla obrazu rastrowego jest rozdzielczość, która określa dokładność, z jaką skaner jest w stanie rozróżnić szczegóły wczytywanego obrazu. Wyraża się liczbą punktów na cal (25,4 mm) i oznacza się skrótem dpi (z angielskiego). Skanery o inżynierskiej rozdzielczości 300 i 400 dpi bez straty dokładności wczytują obrazy map, bowiem rejestrują odpowiednio szczegóły z dokładnością 0,085 mm (25,4 mm/300) lub 0,064 mm (25,4 mm/400), co przy stosowaniu najmniejszej grubości linii 0,130 mm przy kreśleniu na mapie niektórych znaków jest zupełnie wystarczające. Na rys. 3 przedstawiona jest idea mapy rastrowej.
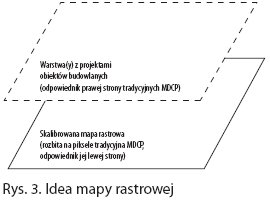
Reprezentuje ją tylko jedna warstwa elektroniczna, która jest odpowiednikiem tradycyjnej, lewej strony mapy do celów projektowych. Projekty obiektów budowlanych można sytuować na tych mapach identycznie jak w przypadku posiadania mapy numerycznej, na założonych przez projektantów „czystych” warstwach elektronicznych, co z kolei będzie odpowiednikiem prawej strony mapy tradycyjnej. W tym miejscu można zauważyć, że poprzez wektoryzację (określanie współrzędnych początku i końca każdego odcinka) można mapę rastrową doprowadzić do postaci numerycznej (wektorowej). Zabiegi te są jednak dość kosztowne i dla większości projektów wręcz niepotrzebne. {mospagebreak}
Mapy rastrowe można nazwać substytutami map numerycznych. Wymagają jednak dużych pojemności (mimo zabiegów „czyszczenia” ze zbędnych pikseli), są mniej „mobilne” i nie posiadają informacji, które zawierają mapy numeryczne, takich jak: ukryte współrzędne wszystkich punktów, powierzchnie obiektów zamkniętych, długości obiektów liniowych itp.
Samo projektowanie (sytuowanie), czyli „kreślenie elektroniczne” według znaków z norm, jest dla obydwu rodzajów map prawie identyczne, ponieważ w przypadkach, kiedy na mapach rastrowych zechcemy „ustawiać” nasze obiekty w określonych odległościach od istniejących obiektów, to wcześniej trzeba określić ich współrzędne, czyli zwektoryzować. Przy operowaniu mapami rastrowymi nie może nam zniknąć z pola widzenia zagadnienie deformacji skanowanych map z niektórych folii, a zwłaszcza z map papierowych. Środkiem zaradczym na to zjawisko jest kalibracja map rastrowych. oskalibrowana mapa rastrowa pod względem tzw. kartometryczności (dokładności operacji pomiarowych na mapie) to produkt doskonalszy od wyjściowego. Do kalibracji powinno się używać punktów o znanych współrzędnych w obydwu układach, tzn. pikselowym i mapy. Te punkty to osnowa geodezyjna i siatka kwadratów. Ponieważ punkty geodezyjne są rzadkie i położone z reguły w sposób przypadkowy w stosunku do terenu inwestycji, najwłaściwszym sposobem jest kalibracja oparta na wszystkich punktach siatki kwadratów wchodzących w zakres mapy do celów projektowych.
W praktyce istnieje 5 modeli kalibracji:
• liniowy izotropowy (równoskalowy), nazywany transformacją Helmerta. Realizuje przesunięcie, zmianę skali (jednakową we wszystkich kierunkach) i obrót układu współrzędnych pikselowych (obrazu rastrowego) przy min. dwóch punktach „m” dostosowania;
• liniowy anizotropowy (różnoskalowy), nazywany transformacją afiniczną. Realizuje przesunięcie, zmianę skali (może być różna w kierunku x i y) i obrót układu współrzędnych pikselowych, przy min. trzech punktach „m” dostosowania;
• biliniowy (dwuliniowy) – min. cztery punkty „m” dostosowania. Stosuje się ją, gdy źródłowy rysunek jest odkształcony w sposób niejednorodny;
• bikwadratowy (dwukwadratowy) – minimalna liczba punktów dostosowania m = 9. Stosuje się ją, gdy źródłowy rysunek uległ skurczowi „poduszkowatemu”, a także zwykłemu skurczowi i niedokładnemu skanowaniu;
• bisześcienny (dwusześcienny) – minimalna liczba punktów dostosowania m = 16. Ten model pozwala korygować najbardziej złożone odkształcenia materiałów źródłowych i niedokładności skanowania.
Dla praktycznej ilustracji zagadnienia kalibracji została zeskanowana (400 dpi) mocno skurczona mapa papierowa, której pierwotna skala wynosiła 1:500. Skurcz spreparowany został na drukarce tak, że siatka po osi y (wschodniej) miała po 90,0 mm, a po osi x (północnej) po 80,0 mm. Sytuacja ta zobrazowana jest na rys. 4, który do niniejszego tekstu został pomniejszony do skali 1:1000, stąd zdeformowana siatka na tym rysunku ma wymiary 45,0 mm (oś wschodnia) × 40,0 mm (oś północna).

Do kalibracji użyto 12 punktów: 22, 23, 24, 39, 40, 41, 56, 57, 58, 73, 74 i 75 o teoretycznych współrzędnych zapewniających idealną siatkę 100,0 mm × 100,0 mm. Efekty kalibracji wykonanej dwoma metodami (Helmerta i afiniczną) zostały przedstawione na rys. 5, który również został zmniejszony do skali 1:1000. Na rysunku tym nałożono dwie mapy. Czerwona to mapa po kalibracji metodą Helmerta.
Czerwona siatka współrzędnych wzdłuż osi wschodniej (y) ma po ok. 53,6 mm, a po północnej (x) po ok. 47,6 mm. Natomiast szara mapa to mapa skalibrowana metodą afiniczną. Szare krzyżyki siatki współrzędnych tej mapy „naciągnięte” zostały dokładnie na teoretyczne ich pozycje, co widać na rysunku. Odległość pomiędzy tymi krzyżykami tak w kierunku wschodnim, jak i północnym wynosi po 50,0 mm. Odchylenie standardowe (błąd średni) wpasowania metodą Helmerta wyniósł σ = 4,41 m (odpowiada to 8,8 mm w skali mapy 1:500), a metodą afiniczną σ = 0,09 m (odpowiada to 0,18 mm w skali mapy 1:500). Przy punktach 22 (–3,74 m; –3,38 m), 40 (–0,12 m; –1,18 m), 74 (–0,11 m; 3,34 m) i 75 (3,79 m; 3,52 m) przykładowo wyszczególniono różnice w „m” pomiędzy skalibrowaną siatką metodą Helmerta a siatką teoretyczną, bezbłędną. Odpowiednie różnice na tych samych punktach pomiędzy siatką z kalibracji afinicznej a siatką teoretyczną wynoszą odpowiednio: 22 (0,02 m; 0,06 m), 40 (–0,07 m; –0,06 m), 74 (–0,05 m; –0,08 m) i 75 (–0,06 m; 0,04 m).

{mospagebreak}
Dla tych, którzy chcą poznać więcej szczegółów dotyczących kalibracji (np. tabele z odchyłkami na wszystkich punktach, jak rozpoznać rozdzielczość skanera, który był używany do skanowania danej mapy), autor odsyła do artykułu Mapy rastrowe i hybrydowe w projektowaniu obiektów budowlanych (Drogownictwo, nr 2/2004) lub na stronę www.geokatedra.pk.edu.pl/ kalibracja.htm.
Mapy hybrydowe (pikselowo-wektorowe)
Mapy hybrydowe, czyli mieszane, składają się z warstw: mapy rastrowej (oczywiście skalibrowanej) i uzupełnianych na bieżąco warstw z obiektami wektorowymi, którymi są wszystkie obiekty budowlane podlegające, zgodnie z ustawą Prawo budowlane i stosownymi rozporządzeniami wykonawczymi, obowiązkowi wykonania inwentaryzacji powykonawczej. Tu wypada nadmienić, że na ogół technologia tworzenia map numerycznych jest następująca:
• utworzenie mapy rastrowej poprzez zeskanowanie i kalibrację istniejących map analogowych,
• stopniowe wzbogacanie mapy rastrowej (od pierwszego wprowadzonego obiektu wektorowego już hybrydowej) o obiekty wektorowe uzyskane z:
– bieżącej inwentaryzacji obiektów budowlanych,
– przekształcania do postaci wektorowej obiektów (szczegółów) z materiałów archiwalnych (muszą istnieć dane z pomiaru niezbędne do określenia współrzędnych),
– wektoryzacji (lub digitalizacji) szczegółów, których współrzędnych nie da się określić z materiałów archiwalnych.
Kiedy ostatni szczegół z mapy rastrowej uzyska współrzędne i zostanie wprowadzony na odpowiednią warstwę tematyczną jako obiekt wektorowy, mapa hybrydowa straci swą postać, przekształcając się w klasyczną postać mapy numerycznej. Inną świetną kompilacją mapy hybrydowej do celów projektowych może być połączenie pełnej mapy numerycznej z ortofotomapą, z uwagi na bogactwo szczegółów niemożliwych do przedstawienia na mapie kreskowej .
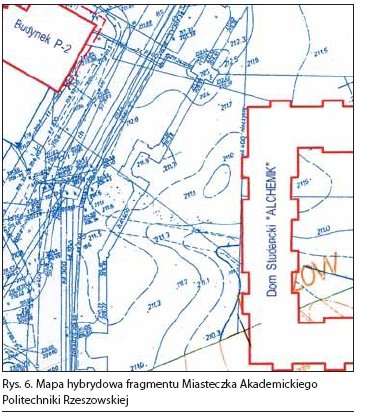
Na rys. 6 przedstawia się mapę hybrydową fragmentu Miasteczka Akademickiego Politechniki Rzeszowskiej. Część pikselową (rastrową) stanowią dwa sąsiednie arkusze mapy zasadniczej z istniejącymi obiektami budowlanymi. Część wektorową (numeryczną) stanowią dwa oddane ostatnio budynki – dydaktyczny P-2, będący dobudową do istniejącego wcześniej budynku, i Dom Studencki „ALCHEMIK”. Taka mapa, popularnie nazywana hybrydową, może służyć do dalszych celów projektowych.
Oglądając rys. 6, warto jeszcze zauważyć:
• bezproblemowe połączenie dwóch (może to być dowolna ilość kawałków, w przypadkach kiedy musimy mieć mapy wstęgowe) arkuszy map rastrowych. Tu arkusze ulokowano na różnych warstwach i nadano im różne kolory, aby przedstawić efekt połączenia i uzgodnienia treści mapy na ich styku. Normalnie mapy „łączy” się na jednej warstwie. Jak na razie, mapy na foliach łączy się wzdłuż styków za pomocą przezroczystych taśm klejących. Jest to czynność niegwarantująca prawidłowego połączenia siatek na sklejanych arkuszach;
• mało czytelne bogactwo treści uzbrojenia podziemnego na mapie jednokolorowej (zwykle czarno-białej). Ten kontrast rzuca się w oczy, gdy rys. 6 porównamy z rys. 2.
Systemy map numerycznych stosowane w projektowaniu
Na rynku polskim funkcjonuje spora ilość systemów, dzięki którym można tworzyć elektroniczne rysunki map. Jeżeli można stworzyć w danym systemie rysunek mapy za pomocą elementów przedstawienia graficznego, które są zgodne z Instrukcją Techniczną K-1 Mapa zasadnicza 1998, to powinno się też stworzyć rysunki projektowanych obiektów budowlanych za pomocą oznaczeń graficznych zawartych w normach: Polska Norma PN-B-01027/2002 Rysunek budowlany – Oznaczenia graficzne stosowane w projektach zagospodarowania działki lub terenu oraz PN-EN ISO 11091 2001 Rysunek budowlany – Projekty zagospodarowania terenu.
Magazyn geoinformacyjny GEODETA w numerach [12/2000] i [1/2001] przytacza 21, istniejących w tamtym okresie, systemów map numerycznych. J. Gajdek i D. Zientek w opracowaniu „Statystyka wdrożeń systemów map numerycznych” [www.prz.rzeszow.pl/wbiis/kg] przytaczają dane z 70 powiatów (ziemskich i grodzkich), z których wynika m.in., że najbardziej rozpowszechnionymi systemami map numerycznych są: EWMAPA, MicroStation, GEO-INFO i GEO- MAP. Ponadto odnotowano w nadesłanych ankietach stosowanie takich systemów, jak: MSG 2000/AutoCAD, GEOKATASTER, TERRABIT, ARC MAP, ARC GIS, SYNERGIA/MAPA 95 i DG DIALOG.{mospagebreak}
Przytoczone dane świadczą o prawdziwym bogactwie stosowanych i przewidywanych do stosowania systemów. Nie można jednak tego stanu ocenić pozytywnie. Władze geodezyjne powinny uświadomić sobie, kto jest aktualnie i będzie w przyszłości największym klientem ośrodków dokumentacji geodezyjnej i kartograficznej w Polsce. W ośrodkach dokumentacji geodezyjnej i kartograficznej ok. 80% prac geodezyjnych dotyczyło budownictwa, z czego najwięcej było map do celów projektowych.
Największym klientem ośrodków dokumentacji są inwestorzy i świadcząca im usługi branża projektowa poprzez geodetów uprawnionych zgłaszających przytoczone wcześniej asortymenty prac geodezyjnych. Ośrodki dokumentacji powinny więc stawiać na pierwszym miejscu potrzeby projektantów i oferować mapy numeryczne w systemach, które zagwarantują import tych map do systemów przez nich posiadanych.
Dotykamy też istotnego problemu po stronie projektantów, a mianowicie: jaki system byłby dla nich najlepszy. Z pewnością podstawowym czynnikiem decydującym o wyborze systemu będzie cena licencji. Większe biura stać będzie na licencje uniwersalne, droższe. Pojedynczy projektanci powinni interesować się systemami tańszymi. Ale oprócz ceny równie ważne dla wyboru systemu będzie:
• możliwość importu jak największej ilości systemów map numerycznych oferowanych przez różne ośrodki w kraju,
• możliwość wczytywania i właściwej kalibracji map rastrowych,
• możliwość pracy na mapach hybrydowych,
• możliwość wykonywania obliczeń z rachunku współrzędnych bezpośrednio na mapie za pomocą odpowiednich pasków narzędziowych,
• możliwość wykonywania rysunków zgodnie z odpowiednimi ww. normami,
• możliwość projektowania ulic i tras z łukami kołowymi i krzywymi przejściowymi,
• możliwość wykonywania przekrojów pionowych i projektowania łuków pionowych,
• możliwość korekty wcześniej narysowanych obiektów poprzez ich obroty i przesunięcia,
• możliwość automatycznego zapisu współrzędnych każdego obliczonego (zaprojektowanego punktu),
• możliwość przyciągania do punktów z numerami, bez numerów i zaczepiania „bez punktu”, co jest opcją wektoryzacji ekranowej.
Prawdopodobnie niewiele systemów map numerycznych posiada wszystkie wcześniej wyszczególnione możliwości. Nawet najbardziej popularny w branży projektowej AutoCAD ich nie posiada. Zapewnia je dopiero dołączenie nakładki CADRaster.
W dalszej części opracowania przybliżone będą zagadnienia związane z projektowaniem na mapach elektronicznych za pomocą systemu, na który Katedra Geodezji im. Kaspra Weigla posiada licencję, a mianowicie systemu C-Geo. System ten posiada wszystkie wymienione wcześniej możliwości i może zaimportować mapy z systemów: AutoCAD, MicroStation, Map Info, EWMapa i Geo-Info. Za pomocą tego systemu mogą być też tworzone mapy numeryczne z możliwością eksportu do wymienionych systemów, a także do systemu Nobel. Autorowi nie jest znany ośrodek dokumentacji w kraju, który prowadziłby mapę numeryczną w systemie C-Geo, ale możliwości tego systemu do stosowania w projektowaniu ocenia bardzo pozytywnie. Firma SOFTLINE mogłaby zablokować lub wyłączyć „duże obliczenia geodezyjne” i oferować odpowiednio tańsze C-Geo w wersji dla projektantów. Zapowiedź Głównego Urzędu Geodezji i Kar tografii, że w lipcu 2006 r. będzie w posiadaniu informacji o stopniu pokrycia poszczególnych województw mapą zasadniczą klasyczną (analogową) i numeryczną, należy uznać za niezwykle istotną. Starostwa decydujące jeszcze o wyborze systemu powinny się dobrze zastanowić nad jego wyborem. Najważniejsze kryteria dla największych „konsumentów” map numerycznych zostały przedstawione wcześniej.
Jerzy Gajdek
starszy wykładowca w Katedrze Geodezji im. Kaspra Weigla Politechnika Rzeszowskiej





